| Figure 1: Ugięcie światła w metryce Schwarzschilda |
Uniwersytet Warszawski
Wydział Fizyki
Obserwatorium Astronomiczne
Jan Skowron
Nr albumu: 195845
Modele podwójnych soczewek grawitacyjnych
Praca magisterska
kierunek: Astronomia
prof. Michała Jaroszyńskiego
Obserwatorium Astronomiczne
Uniwersytetu Warszawskiego
Oświadczenie kierującego pracą
Oświadczam, że niniejsza praca została przygotowana pod moim kierunkiem i stwierdzam, że spełnia ona warunki do przedstawienia jej w postępowaniu o nadanie tytułu zawodowego.
DataPodpis kierującego pracą
Oświadczenie autora (autorów) pracy
Świadom odpowiedzialności prawnej oświadczam, że niniejsza praca dyplomowa została napisana przeze mnie samodzielnie i nie zawiera treści uzyskanych w sposób niezgodny z obowiązującymi przepisami.
Oświadczam również, że przedstawiona praca nie była wcześniej przedmiotem procedur związanych z uzyskaniem tytułu zawodowego w wyższej uczelni.
Oświadczam ponadto, że niniejsza wersja pracy jest identyczna z załączoną wersją elektroniczną.
DataPodpis autora (autorów) pracy
Praca zajmuje się zjawiskami mikrosoczewkowania grawitacyjnego przez układy podwójne, w tym modelowaniem krzywych zmian blasku ze szczególnym uwzględnieniem promienia źródła.
Zawiera podstawy teorii soczewkowania wraz z wyprowadzeniem równania na obrazy oraz pojęciami płaszczyzn soczewki i źródła, macierzy deformacji, wzmocnienia, a także kaustyki i krzywej krytycznej. Zostały szeroko omówione przypadki soczewki punktowej i soczewki podwójnej wraz z kształtami kaustyki oraz z dyskusją obrazów źródeł punktowych i źródeł o skończonych promieniach. Szczególne miejsce w pracy zajmują wyprowadzenia wzorów i opisy metod przydatnych w komputerowym modelowaniu krzywych blasku w zjawiskach mikrosoczewkowania, takich jak otrzymywanie położeń, kształtów i wzmocnień obrazów źródeł rozciągłych, obliczanie kształtów krzywej krytycznej i kaustyki, a także wyznaczania strumieni źródła i tła. Zostały opisane problemy związane z wyznaczaniem promieni źródeł metodą dopasowania krzywej do obserwacji. Przedstawione są wyniki poszukiwania ograniczeń na rozmiary źródła dla 21 modeli zjawisk spośród obserwowanych przez zespół OGLE.
Praca wprowadza również program komputerowy, który przy pomocy interfejsu graficznego prezentuje dla zadanych parametrów modelu przebieg odpowiadającego mu zjawiska soczewkowania przez układ podwójny. Program pozwala odtworzyć położenia i kształt obrazów dla każdego położenia źródła. Obrazuje również kształt krzywej blasku dla zdefiniowanych parametrów układu podwójnego przy zadanej trajektorii i promieniu źródła. Pozwala to w sposób interaktywny dobierać parametry poszukiwanego modelu.
astrofizyka, szoczewkowanie grawitacyjne, układy podwójne, modele numeryczne, parametry gwiazd.
13.7 Astronomia i Astrofizyka
Astronomia zajmuje się badaniem obiektów odległych. Liczba ciał niebieskich, na których człowiek zdołał stanąć, jest równa zaledwie 2. Bezpośrednie badania, za pomocą sond kosmicznych, ograniczają się tylko do Układu Słonecznego. Dlatego najważniejszym narzędziem astronomii było, jest i będzie badanie promieniowania, które dochodzi do Ziemi z całego Wszechświata.
Światło wpadające do naszych teleskopów zdradza nam naturę źródła, z którego zostało wyświecone. Ale nie tylko. Dowiadujemy się również co działo się ze światłem na drodze od źródła do obserwatora. W ten sposób odkryliśmy pył i gaz w Naszej Galaktyce; dzięki przesunięciu ku czerwieni odległych galaktyk poznaliśmy dynamikę Wszechświata; skład atmosfery może zostać odczytany z modyfikacji jakie wprowadza w widmie obserwowanych gwiazd. Zmiany światła na jego drodze są równie ważnym narzędziem astronomii jak badanie samych świecących obiektów.
Gdy myślimy o ciemnej materii, jedynym sposobem jej znalezienia i zliczenia jest szukanie jak wpływa ona na jasną materię. Mogą to być obserwacje pozycyjne gwiazdy, która ma ciemnego towarzysza, czy badanie profilu gęstości świecących składników galaktyk.
W tej pracy zajmujemy się wpływem materii (również ciemnej) na przechodzące w jej otoczeniu promienie świetlne, a konkretnie ugięciem promieni w polu grawitacyjnym.
Obecność każdej materii obdarzonej masą wprowadza zmiany w czasoprzestrzeni, które skutkują zakrzywianiem toru światła i powstaniem dodatkowych obrazów jednego źródła, różnym czasem dotarcia sygnałów, oraz modyfikacją położenia i kształtu obrazu. Zjawiska te noszą wspólną nazwę soczewkowania grawitacyjnego. Po raz pierwszy ,,soczewkopodobne” zachowanie gwiazd przez ugięcie światła w polu grawitacyjnym, opisał [Einstein 1936].
Pierwszym obiektem, dla którego zaobserwowano dwa obrazy, był kwazar Q 0957+561 (więcej w [Walsh et al. 1979, Stockton 1980]). Obrazy powstały wskutek ugięcia światła przez galaktykę znajdującą się między nami a kwazarem. Dziś znamy już wiele podobnych przypadków, a jednym z najciekawszych jest tzw. Krzyż Einsteina (odkryty przez [Huchra et al. 1984]), który ma aż 4 obrazy.
Czas propagacji sygnałów poruszających się po trajektoriach, które tworzą różne obrazy źródła, może się różnić. Typowe dla kwazarów zmiany jasności, wraz z możliwością rozdzielenia ich obrazów i osobnego monitorowania ich zmienności, pozwala zmierzyć względne opóźnienie sygnałów. Stąd można wprowadzić niezależne ograniczenia na stałą Hubble’a [Borgeest & Refsdal1984]. Od modelu kosmologicznego zależy również szansa zaobserwowania soczewkowanego kwazara. Wyznaczane prawdopodobieństwa zjawiska mogą dać oszacowania na średnią gęstość materii we Wszechświecie (np. [Chae et al. 2002]).
Kolejnym przejawem soczewkowania grawitacyjnego, po raz pierwszy wspomnianym w pracy [Lynds & Petrosian 1986], były tzw. jasne łuki w gromadach galaktyk. Są to silnie zdeformowane, wielokrotne obrazy galaktyk o większych od gromady przesunięciach ku czerwieni. Ich obserwację mogą służyć modelowaniu rozkładu masy w gromadach i określeniu zawartości ciemnej materii. Możemy się też spotkać z tak zwanym słabym soczewkowaniem. Nawet gdy nie obserwujemy wielokrotnych obrazów, położenia jednorodnie rozłożonych galaktyk w tle gromady mogą ulec zmianie, a ich kształty – deformacji. Obserwując takie statystyczne odchylenia możemy wykryć i zmierzyć nieświecącą materię, która je powoduje.
Soczewkowanie gwiazd w Galaktyce mimo że tworzy obrazy zbyt bliskie, by
rozdzielić je za pomocą ziemskich teleskopów, jest wykrywane metodami
fotometrycznymi dzięki przejściowemu pojaśnieniu, jakie mu towarzyszy. Takie
zjawisko nazywamy mikrosoczewkowaniem grawitacyjnym. Wyznaczenie
częstości jego występowania daję ocenę liczby zwartych obiektów w Galaktyce i tym samym daje odpowiedź na pytanie jaka część ciemnej materii
ma postać skondensowaną.
Prowadzenie systematycznych obserwacji zjawisk mikrosoczewkowania jako pierwszy zaproponował [Paczyński 1986].
Na początku lat dziewięćdziesiątych ubiegłego stulecia powstało kilka projektów obserwacyjnych, których celem było zbadanie częstości występowania soczewkowania gwiazd przez obiekty Galaktyki i jej halo. Były to projekty: EROS (Expérience pour la Recherche d’Objets Sombres), OGLE (The Optical Gravitional Lensing Experiment) oraz MACHO (MAssive Compact Halo Objects).
Do dziś powstało wiele grup i projektów zajmujących się mikrosoczewkowaniem, przy tym szukaniem planet pozasłonecznych i niezależnym wyznaczaniem własności gwiazd w Galaktyce. Należą do nich m. in.:
MOA (Microlensing Observations in Astrophysics),
PLANET (Probing Lensing Anomalies NETwork),
µFUN (Microlensing Follow - Up Network),
MPS (Microlensing Planet Search Project).
Dzisiaj liczba zaobserwowanych przypadków mikrosoczewkowania grawitacyjnego jest rzędu tysięcy. Możemy pokusić się o pierwsze wnioski statystyczne prowadzące do lepszego poznania składu i dynamiki Galaktyki. Jednym z ważniejszych wyników dotychczasowych obserwacji mikrosoczewkowania gwiazd w Obłokach Magellana przez obiekty halo Galaktyki jest wniosek, że tylko niewielka część galaktycznej ciemnej materii może być skupiona w masywnych zwartych obiektach.
Zależność stopnia pojaśnienia od czasu (czyli ,,krzywa zmian blasku”) może dostarczyć dodatkowych informacji o zjawisku. Charakterystyczny kształt tej zmienności pozwala niekiedy stwierdzić, że soczewką jest układ dwóch mas.
Na podstawie obserwacji soczewkowania przez układ podwójny można wyznaczyć stosunek mas składników. W kilku przypadkach zmierzono na tyle ekstremalne jego wartości, że można mieć pewność, iż jeden ze składników układu jest planetą (np. [Udalski et al. 2005]). Na krzywą blasku mikrosoczewkowanej gwiazdy wpływa roczny ruch Ziemi. Gdy efekt jest silny i uda się do danych dopasować model uwzględniający paralaksę, otrzymuje się związek masy soczewki i jej odległości (np. [Smith et al. 2002]). Nie pozwala to jeszcze określić samej masy soczewki. Dopiero analiza zjawiska wywołanego przez układ podwójny i określenie względnych rozmiarów źródła wraz z pomiarem paralaksy daje podstawę do niezależnego wyznaczenia fizycznych parametrów, w tym także masy [An et al. 2002].
Dla kilku zjawisk o bardzo dokładnych i częstych pomiarach jasności w czasie silnego wzmocnienia udało się wyznaczyć pociemnienie brzegowe soczewkowanych gwiazd (np. [Abe et al. 2003]), a także odchylenia ich kształtu od sferycznego.
Zespoły zajmujące się mikrosoczewkowaniem grawitacyjnym w sposób masowy i systematyczny monitorują jasności milionów gwiazd. Dodatkowym efektem ich poszukiwań jest stworzenie wielkich baz danych gwiazd wraz z zależnością ich jasności od czasu. Długotrwała i stabilna fotometria dostarcza niezwykle cennego materiału naukowego dla badających gwiazdy, niemożliwego do pozyskania innymi metodami, nawet przy użyciu największych teleskopów.
Wielkim osiągnięciem masowej fotometrii są odkrycia małych towarzyszy gwiazd metodą tranzytów. Ich okresowe przejścia przed tarczą gwiazdy, wokół której krążą, powodują pociemnienie jej blasku. Znamy już kilkaset takich obiektów (OGLE), a ich odkrycie nie byłoby możliwe bez systematycznej, dokładnej fotometrii.
W tej pracy korzystam z danych pochodzących z projektu OGLE. W ramach którego został zaimplementowany System Wczesnego Ostrzegania (EWS; Early Warning System) [Udalski et al. 1994, Udalski et al. 2003]. System przeprowadza fotometrię w czasie rzeczywistym, metodą odejmowania obrazów, i wykrywa pojaśnienia obiektów, które mogą być wynikiem soczewkowania. Automatycznie ogłaszany alarm pozwala rozpocząć szczegółowe obserwacje podejrzanego obiektu, przez zespoły na całym świecie, które regularnie korzystają z odkryć OGLE.
Obecnie projekt OGLE regularnie monitoruje ok. 170 milionów gwiazd w kierunku Centrum Galaktyki oraz ok. 33 miliony gwiazd z Obłoków Magellana. Wszystkie informacje dotyczące projektu, listę publikacji oraz dane i alarmy z EWS są dostępne na stronie internetowej projektu:
/~ogle/
W pracy zajmiemy się zjawiskami mikrosoczewkowania wywołanymi przez układy podwójne. W związku z dużą ilością zjawisk wykrywanych przez OGLE, spośród ponad 500 rocznie aż kilkanaście może być interpretowane jako wywołane przez soczewkę podwójną. Można dla nich wyznaczać stosunki mas składników, a w szczególnych przypadkach także odległość do układu, jego masę i rzutowaną separację. Jest to niezależna od tradycyjnych, metoda wyznaczania parametrów fizycznych gwiazd.
Krzywa blasku jest jedyną informacją jaką posiadamy o zjawisku1. Wizualna inspekcja krzywej pozwala ocenić, czy mamy do czynienia z soczewkowaniem przez układ podwójny.
Wszystkie parametry zjawiska musimy wyznaczyć z dopasowania modelu
teoretycznego. O ile stosunek mas dany jest wprost, to inne fizyczne
parametry układu, np. separacja składników, promień źródła, czy parametr
zderzenia wyrażają się poprzez promień Einsteina rE, będący kombinacją
całkowitej masy soczewki oraz wszystkich odległości. Zniesienie
degeneracji i niezależne wyznaczenie masy oraz odległości do soczewki
wymaga pomiaru paralaksy oraz znajomości stosunku promienia źródła do
promienia Einsteina. Dokładne obserwacje w czasie silnego wzmocnienia
(przejść przez kaustyki) pozwalają związać promień źródła z promieniem
Einsteina zrzutowanym na płaszczyznę źródła. Niestety ta faza zjawiska
trwa krótko i nie zawsze liczba pomiarów jest dostateczna (pogoda, pora
dnia, inne obiekty przeglądu). W pracy badam do jakiego stopnia można
ograniczyć rozmiary źródła nie dysponując ,,idealnymi” obserwacjami.
Jednym z efektów mojej pracy nad komputerowym modelowaniem zjawisk wywołanych przez układy podwójne było stworzenie programu, który przy pomocy interfejsu graficznego pozwala w sposób interaktywny badać związek krzywych zmian blasku z parametrami modelu. Program wylicza i wyświetla położenia i kształty obrazów powstałych w skutek soczewkowania, oraz pomaga zrozumieć ich związek z kształtem krzywej krytycznej i położeniem źródła względem kaustyki.
Większość rysunków w tej pracy, takich jak przykłady obrazów i krzywych blasku, była obliczona przy pomocy tego programu.
Opis programu, spis parametrów jakie uwzględnia, wymagania oraz wskazówki dotyczące używania znajdują się z załączniku do pracy (str. ??).
Niektóre procedury numeryczne, używane przeze mnie przy modelowaniu zjawisk, pochodzą od Shude
Mao i były przezeń po raz pierwszy stosowane w pracy [Mao 2001].
W dalszej części pracy opisuję metody i wzory, którymi się one posługują by otrzymać
kształty kaustyk i krzywych krytycznych, wzmocnienia źródeł punktowych oraz kształty i pola powierzchni obrazów rozciągłych źródeł.
W rozdziale 2 wprowadzam podstawowe pojęcia dla soczewkowania, takie jak kąt Einsteina, płaszczyzny soczewki i źródła, oraz tłumaczę powszechnie stosowane przybliżenie słabego pola grawitacyjnego.
Rozdział 3 zawiera wyprowadzenie równania na obrazy i jego rozwiązanie w najprostszym przypadku – soczewki punktowej. Opisuję tam zmiany jasności i położeń obrazów nieskończenie małego źródła, a także źródeł o skończonych rozmiarach. Wprowadzam też pojęcia kaustyki i krzywej krytycznej, dla ogólnego przypadku soczewkowania.
Zjawisko soczewkowania przez układy podwójne szczegółowo omawiam w rozdziale 4. Obok równania na obrazy i wprowadzenia dwóch nowych parametrów określających soczewkę (stosunku mas i separacji składników), prezentuję tam przykłady obrazów jakie mogą powstać w czasie takiego zjawiska.
W rozdziale 5 wyprowadzam wzory, które służyły do wyliczania kaustyk i krzywych krytycznych dla soczewek podwójnych, oraz do wyznaczania położeń obrazów i wzmocnień punktowych źródeł. Pokrótce opisuję też metodę otrzymywania wzmocnień źródeł rozciągłych.
Parametry, którymi opisuję zjawisko soczewkowania przez układ podwójny, opisałem w rozdziale 6. Można tam również znaleźć postać funkcji χ2 charakteryzującej dobroć danego modelu, jak i krótki opis algorytmu znajdowania najlepszego dopasowania do danych obserwacyjnych.
Na początku rozdziału 7 znajduje się opis wpływu promienia źródła na krzywą blasku zjawiska, a także problemy z jego modelowaniem. Dalej prezentuję zastosowaną przeze mnie metodę badania zjawisk i ich modeli pod kontem możliwości określenia promieni źródeł. Opisuję i szczegółowo dyskutuję wyniki, które uzyskałem na podstawie analizy 21 zjawisk mikrosoczewkowania zaobserwowanych przez OGLE.
Rozdział 8 kończy pracę. Zawiera przypomnienie najważniejszych faktów i wzorów otrzymanych we wcześniejszych rozdziałach oraz podsumowuje możliwości zaproponowanej metody badania zjawisk.
Zagadnienie soczewkowania grawitacyjnego ma swój początek w Ogólnej Teorii Względności [Einstein 1915], która wiąże geometrię przestrzeni z materią. Każda masa ,,zakrzywia” przestrzeń i w ogólności, przy dowolnym rozkładzie masy metryka przestrzeni staje się nietrywialna. Jednakże dla najprostszego przypadku, pustej przestrzeni wokół punktowej masy M znana jest od dawna. Po raz pierwszy otrzymał ją Karl Schwarzschild, jako rozwiązanie równań Einsteina.
W wyrażeniu na metrykę znajduje się jeden parametr o wymiarze długości, jest więc charakterystyczną skalą. Nazywamy go promieniem Schwarzschilda.
| Rs=2 |
|
gdzie G jest stałą grawitacji, a c prędkością światła. W pobliżu masy M (gdy r jest rzędu Rs) metryka zasadniczo różni się od metryki płaskiej przestrzeni. Jednak w granicy nieskończonej odległości musi w nią przejść, gdyż wpływ oddziaływania grawitacyjnego masy znika. W tej pracy będziemy używać przybliżenia obowiązującego w dużych odległościach, zwanego przybliżeniem słabego pola grawitacyjnego.
Światło rozchodzi się po zerowych geodezyjnych. W metryce Euklidesowej geodezyjnymi są proste i tak też porusza się światło w ziemskich warunkach. Na powierzchni Ziemi wyrażenie 2GM/c2 R jest rzędu 10−10, dlatego bez obaw możemy stosować zasady optyki geometrycznej w płaskiej przestrzeni. Natomiast w czasoprzestrzeni Schwarzschilda tory promieni świetlnych mogą być dużo bardziej skomplikowane. Światło z nieskończoności przebiegając w pobliżu centrum masy, ugnie swój tor, być może obiegnie masę dookoła, i odleci do nieskończoności. W takim wypadku, jako dalecy obserwatorzy, możemy rozważać kąt o jaki tor promienia został odchylony (patrz rysunek 1).
Figure 1: Ugięcie światła w metryce Schwarzschilda
Ilościowy opis propagacji światła w czasoprzestrzeni Schwarzschilda jest skomplikowany, ale w przypadku już wspomnianego słabego pola (r >> Rs), można otrzymać prosty wynik.
W dużych odległościach od masy M (r>>Rs), kąt α będzie mały (α<<1), a odległość między punktami I oraz I′ – zaniedbywalna. Dlatego na kolejnym rysunku te punkty zostały utożsamione. Nie ma również znaczenia, jak zdefiniujemy parametr zderzenia, czy jako długość odcinka MI, czy MI′. Dodatkowo ta część trajektorii, na której zachodzi ugięcie, jest dużo krótsza niż odległość od źródła i pozostała droga do obserwatora. Dlatego tor światła możemy traktować jak dwuodcinkową łamaną, o ugięciu α.
Figure 2: Ugięcie w odległości >>Rs
Kąt ugięcia promienia świetlnego przez masie M jest równy:
| α= |
| , (1) |
gdzie b jest parametrem zderzenia. Po raz pierwszy ten wzór otrzymał Einstein w 1915 roku, stąd często kąt α nazywa się kątem Einsteina.
Jest to najważniejszy wynik dla dalszych rozważań. Zauważamy bowiem, że we Wszechświecie, obszary silnego pola grawitacyjnego, zajmują bardzo małą objętość. Rozmiary obiektów astronomicznych, są z reguły dużo większe od ich promieni Schwarzschilda. Zatem, prócz takich obiektów jak czarne dziury czy gwiazdy neutronowe, nie wytwarzają one silnego pola.
Można pokazać, że gdyby rozdzielić całą materię Wszechświata pomiędzy czarne dziury o masie 1 M⊙, to losowo biegnące promienie światła, trafiałyby w obszary silnego pola z prawdopodobieństwem rzędu 10−18.
Możemy założyć, że światło biegnące do naszych teleskopów, rozchodzi się w słabym polu grawitacyjnym. Stosujemy więc wzór Einsteina.
Warto w tym miejscu wspomnieć, że ów wzór miał pewne znaczenie dla potwierdzenia słuszności Ogólnej Teorii Względności.
Odchylenie toru światła biegnącego w pobliżu masywnego ciała, liczone przy pomocy Powszechnego Prawa Ciążenia, ma bowiem dwukrotnie mniejszą wartość.
| α= |
| , |
Po raz pierwszy wynik ten otrzymał [Soldner 1804]. Niezależnie, ponad sto lat później, tę samą wartość opublikował [Einstein 1911]. Po powstaniu Ogólnej Teorii Względności i otrzymaniu poprawnej wartości (1), dokładny pomiar kąta odchylenia światła mógł rozstrzygnąć o słuszności nowej teorii Einsteina. Były podejmowane próby zmierzenia zmian położeń gwiazd, leżących tuż przy tarczy Słońca, prowadzone podczas całkowitych zaćmień. W 1919 roku po raz pierwszy udało się potwierdzić wnioski Ogólnej Teorii Względności, ekspedycji kierowanej przez Eddingtona [Eddington 1919].
W omawianym zjawisku obiekt obdarzony masą powoduje ugięcie światła, więc często nazywamy go soczewką, a całe zjawisko soczewkowaniem.
Tak jak w przypadku zwykłych układów optycznych, efektem ugięcia promieni pochodzących od źródła, jest zmiana położenia i właściwości obrazów. Obserwatorowi wydaje się, że obiekt znajduje się w tym kierunku, z którego przychodzi światło. Może się zdarzyć, że promienie wysłane ze źródła w kilku kierunkach, zostaną ugięte tak, że trafią do tego samego obserwatora. W tym przypadku mamy do czynienia z kilkoma obrazami tego samego obiektu.
Aby znaleźć obrazy i opisać tor światła, wprowadza się dwa pojęcia, płaszczyznę soczewki oraz płaszczyznę źródła. Tak jak przedstawiają to rysunki 3 i 4, obie płaszczyzny są prostopadłe do osi optycznej, a leżą odpowiednio w odległościach soczewki dOL i źródła dOS. Odległość pomiędzy soczewką a źródłem oznaczamy dOL. W zastosowaniu do zjawisk mikrosoczewkowania w Galaktyce dOL+dLS=dOS; w przypadku soczewki i źródła w odległościach ,,kosmologicznych” równość ta noże nie być spełniona.
Figure 3: Płaszczyzny źródła i soczewki
Figure 4: Płaszczyzny źródła i soczewki
W obu płaszczyznach wprowadźmy układy współrzędnych. Parametr zderzenia b→ będzie dwuwymiarowym wektorem w płaszczyźnie soczewki. Możemy również zapisać kąt α w postaci wektorowej, jako kąt skierowany w kierunku odwrotnym niż parametr zderzenia b→.
| α= − |
|
| (2) |
W ogólności kąt α nie musi być równoległy do b→, jak to ma miejsce w przypadku punktowej masy. Znajdziemy równanie na obrazy nie zakładając nic o kącie, prócz tego, że znamy jego wartość jako funkcję parametru zderzenia b→. Dla dowolnego rozkładu masy, po podzieleniu go na małe fragmenty, możemy wysumować kąty odchylenia od każdego elementu i w ten sposób wyznaczyć α(b→) (patrz rozdział 3.4).
Rysunek 5 przedstawia bieg promienia światła zakrzywionego o pewien kąt α, położenie źródła i obrazu, oraz wprowadza użyteczne oznaczenia.
Figure 5: Równanie na obrazy
W płaszczyźnie soczewki położenie źródła opisaliśmy przez wektor b0→, któremu w płaszczyźnie źródła odpowiada dOS/dOLb0→. Podobnie położenie obrazu opisaliśmy przez wektor b→, któremu odpowiada dOS/dOLb→. Ten wektor pomniejszony o wektor ugięcia dLSα daje nam położenie źródła.
Zapisując tą zależność wektorową mamy równość:
|
| + dLSα= |
|
|
Po odpowiednim podzieleniu stronami, otrzymujemy równanie nazywane ,,równaniem na obrazy”:
| = |
| + |
| α (3) |
Oznaczając kombinację odległości przez D, możemy je przepisać w jeszcze prostszej postaci:
| (4) |
gdzie
| D= |
| (5) |
Ugięcie światła przez pole grawitacyjne jest efektem geometrii czasoprzestrzeni i nie wiąże się z żadnymi aktami emisji bądź absorpcji światła. Zmienia sie tylko kierunek rozchodzenia się i przekrój widzianej wiązki. Nie ma natomiast wpływu na częstość, więc natężenie światła Iν w stożku pozostaje stałe. Dlatego też, w każdej częstości, jasność powierzchniowa obrazów i źródła są takie same.
Obserwowany strumień obrazu, jest iloczynem jasności powierzchniowej I i kąta bryłowego dΩ z jakiego przychodzi do obserwatora. Podobnie strumień od źródła jaki by dotarł przy nieobecności soczewki jest równy iloczynowi tej samej jasności powierzchniowej I i niezaburzonego kąta bryłowego dΩ0. Stosunek tych strumieni nazywamy wzmocnieniem i oznaczamy Amp.
| Amp = |
| = |
| = µ |
Przy tych samych jasnościach powierzchniowych, wzmocnienie jest równe wielkości oznaczonej przez µ. µ, zdefiniowane jako iloraz kątów bryłowych, nazywamy powiększeniem.
Rozważmy źródło znajdujące się w odległości kątowej β0 od osi optycznej i infinitezymalny kąt bryłowy dΩ0 oraz obraz opisywany kątem β i światłem przychodzącym z dΩ. Gdy znamy zależność między położeniami β0 od β, możemy wyznaczyć szukany stosunek jako wyznacznik macierzy deformacji:
| = det |
|
|
|
Przechodząc ze współrzędnych kątowych na liniowe możemy wzmocnienie zapisać następująco:
| µ= |
| = det |
|
= det |
|
= |
| = |
|
gdzie przez A oznaczyłem macierz ||∂b0→/∂b→ ||. Macierz deformacji A może zostać wyznaczona ze znanego już równania na obrazy (4).
Najprostszym przypadkiem jest soczewka składająca się tylko z jednej masy leżącej między obserwatorem a źródłem. W takiej sytuacji znamy kąt o jaki odchyli się światło, więc dla każdego położenia źródła możemy policzyć, z jakiego kierunku dotrze do obserwatora, czyli gdzie obserwator będzie widział obraz.
Możemy podstawić znaną nam wielkość kąta α=−4GM/c2b2b→. Widzimy, że b→, b0→ i α leżą w jednej płaszczyźnie, przechodzącej przez źródło, obserwatora i soczewkę. Dzięki temu możemy znakomicie uprościć równanie (4) do postaci skalarnej.
| b0=b− |
| D |
|
Z zebranych stałych w tym równaniu tworzymy jedną wielkość
| rE2= |
| D (6) |
Widzimy, że rE ma wymiar długości. Nazywamy go promieniem Einsteina. Ostatecznie otrzymujemy bardzo prostą postać równania na obrazy dla punktowej soczewki grawitacyjnej
| 0=b2−b0b−rE2 (7) |
Promień Einsteina jest w tym równaniu jedyną stałą zależącą od stałych fizycznych i geometrii układu. Dlatego gdy wyrazimy b i b0 przez rE jako jednostkę długości, otrzymamy kanoniczną postać równania dla problemu soczewki punktowej, która nie zależy od konkretnej realizacji fizycznej:
| 0=b2−b0b−1 |
Równanie na obrazy dla pojedynczej soczewki jest więc równaniem kwadratowym. Dlatego też, jest to jeden z niewielu przypadków gdy obrazy można znaleźć analitycznie. Warto zauważyć, że jest to również przykład, w którym jedno źródło ma więcej niż jeden obraz.
Wyróżnik równania jest dodatni, otrzymamy zatem dwa obrazy. Wyjątkiem jest sytuacja gdy parametr b0=0, czyli źródło leży dokładnie za soczewką. W tej sytuacji, gdy obserwator, soczewka i źródło są na jednej prostej (osi optycznej), nie mamy żadnego wyróżnionego kierunku prostopadłego do niej. W efekcie każdy punkt na okręgu |b→|=1 jest poprawnym rozwiązaniem. Mamy więc nieskończoną liczbę rozwiązań (obrazów), tworzących pierścień o promieniu Einsteina wokół soczewki, tzw. pierścień Einsteina.
Wzmocnienie punktowego źródła leżącego dokładnie za soczewką jest formalnie nieskończone, bo jego obraz tworzy nieskończona liczba punktów. Średnica dowolnego obiektu astronomicznego jest zawsze większa od zera, a jego obraz, gdyby leżał dokładnie za soczewkującą masą, byłby pierścieniem o takiej szerokości jak źródło [Liebes 1964]. Wzmocnienie jest bardzo duże, ale skończone.
Omówiliśmy przypadek, gdy b0=0. Dla wszystkich innych wartości, otrzymamy dokładnie dwa obrazy.
Figure 6: Obrazy punktowego źródła
Na rysunku 6 narysowany jest okrąg o promieniu 1. Wszystkie wielkości w tym zagadnieniu wyrażamy w jednostkach rE, dlatego fizycznie oznacza to długość promienia Einsteina.
Oba obrazy, źródło i soczewka leżą w jednej płaszczyźnie (porównaj rysunek 4). Oznacza to, że na niebie będą leżeć na jednej prostej. Gdy znamy już tą podstawową zasadę, możemy zastanawiać się jak będą wyglądały obrazy źródła o niezerowych rozmiarach. Każdy punkt źródła rozciągłego możemy potraktować jako źródło punktowe i zastosować do niego otrzymane wzory na obrazy. Każdy punkt będzie miał dwa obrazy, nazwijmy je obraz ,,+” i ,,-”. Z ciągłości wzorów możemy przypuszczać, że wszystkie obrazy ,,+” utworzą pewien spójny i ograniczony obszar. Podobnie będzie z obrazami ,,-”. Co więcej, wszystkie obrazy punktów leżących na brzegu źródła znajdą się również na brzegach utworzonych obszarów. Na rysunku 7 znajduje się przykład, jak mogą wyglądać obrazy źródła o rozmiarach rS=0.15 w jednostkach promienia Einsteina, w ,,pobliżu” soczewki punktowej.
Figure 7: Obrazy źródła rozciągłego o promieniu rS=0.15 rE. Czarne koło reprezentuje źródło; soczewka znajduje się w środku; I+ i I− to obrazy.
Gdy rzut źródła na płaszczyznę soczewki oddala się od soczewki, czyli rośnie parametr b0, wartości b+ oraz b− dążą do innych granic.
| |||||||||||||||||||||||||||||||||||||||
Im bardziej oddalamy się do nieskończoności, tym obraz ,,+” jest bliżej źródła, a obraz ,,-” bliżej soczewki. Jak to później pokażemy, jasność pierwszego obrazu zbiega do jasności źródła, a jasność drugiego do 0. Dla źródła rozciągłego o stałej jasności powierzchniowej, wzmocnienie będzie proporcjonalne do powierzchni obrazów. I tak, jak widać na rysunku 7, gdy obraz zbliża sie do soczewki, jego rozmiary (zatem i wzmocnienie) muszą maleć do zera, gdy zbliża się do źródła, jego rozmiary stają sie podobne do rozmiarów źródła. Te obserwacje zgadzają się z naszą intuicją. Daleko od masy, która wprowadza zaburzenia, chcemy oglądać tylko jeden obraz, w tym samym miejscu na niebie, gdzie znajduje się źródło i o tej samej jasności.
Rysunek 8 przedstawia przejście obiektu o promieniu rS=0.05 w tle soczewki punktowej. Minimalna odległość bmin miedzy źródłem a soczewką jest równa 0.2.
Figure 8: Przejście źródła w tle soczewki punktowej. Każdemu położeniu źródła (czarne koła) odpowiadają kolejne pary obrazów.
Tak jak już było wspomniane w rozdziale 3.2, jasność powierzchniowa obrazów, powstałych na skutek soczewkowania grawitacyjnego, jest taka sama jak jasność powierzchniowa źródła. Stąd całkowita jasność zależy tylko od powierzchni obrazu, a wzmocnienie µ jest stosunkiem powierzchni obrazu do powierzchni źródła. Spróbujmy znaleźć wzmocnienie w przypadku soczewki punktowej dla infinitezymalnie małego źródła.
| µ= det |
|
= det |
|
|
| = |
|
|
Wstawiając wzory na położenia obrazów b+ i b−, możemy wyznaczyć ich wzmocnienie, w zależności od położenia źródła.
|
Całkowite wzmocnienie będzie sumą wzmocnień wszystkich obrazów.
| µ = | ⎪ | µ+ | ⎪ | + | ⎪ | µ− | ⎪ | = |
| (10) |
Otrzymany wzór jest szczególnie ważny, gdy rozważamy zjawiska soczewkowania w naszej Galaktyce. Wielkości kątowe promieni Einsteina dla typowych obiektów galaktycznych o masach rzędu masy Słońca i odległościach kilku kiloparseków, są rzędu milisekund łuku. Jest to poniżej zdolności rozdzielczej dzisiejszych teleskopów, więc nie możemy obserwować oddzielnych obrazów. Jednak doskonale widać pojaśnienie źródła, co przy wykorzystaniu powyższego wzoru umożliwia nam badanie zjawiska metodami fotometrycznymi.
Przykłady krzywych zmian blasku przy przechodzeniu obiektu w tle soczewki punktowej przedstawia rysunek 9. Na lewej części rysunku jest narysowanych 6 różnych trajektorii źródła, a na prawej odpowiadające im zmiany jasności.
Figure 9: Zmiany blasku źródła w soczewkowaniu przez masę punktową.
Rozważmy teraz sytuację, w której światło biegnące od źródła napotyka na swojej drodze pewien rozciągły rozkład masy. Do tej pory zakładaliśmy, że kąt ugięcia jest bardzo mały. Teraz dodatkowo załóżmy, że grubość soczewki wzdłuż promienia świetlnego jest niewielka, co zapewnia, że odległość promienia od osi optycznej na drodze poprzez soczewkę, zmienia się mało w porównaniu z charakterystyczną skalą zmian pola grawitacyjnego.
W tym przybliżeniu przejście światła w pobliżu wszystkich elementów masy składających się na soczewkę, możemy opisać tym samym wektorem b→ na dwuwymiarowej płaszczyźnie soczewki, a całą soczewkę możemy traktować jako płaski rozkład masy o gęstości powierzchniowej Σ(b→). Każdy element masy będzie uginał światło kąt Einsteina, a pełny kąt ugięcia będzie sumą po całym rozkładzie.
| α= |
| ∫ |
|
| d2 b′ (11) |
Równanie na obrazy jest odwzorowaniem z płaszczyzny obrazów na płaszczyznę położeń źródła. W rozdziale 3.2 wprowadziliśmy już pojęcie macierzy deformacji A nazwanej tak, ponieważ mówi nam, jak modyfikuję się położenie obrazu przy małych przesunięciach źródła, co tłumaczy się, w przypadku źródeł rozciągłych, na modyfikacje kształtu i powierzchni obrazu.
|
Wyznacznik macierzy A daje nam informacje o tym, jak odwzorowanie modyfikuje pole powierzchni. Jeśli w danym punkcie wartość | detA | jest mniejsza od jedynki, to w jego otoczeniu większemu obszarowi powierzchni obrazu (wskazywanemu przez b→), odpowiada mniejszy obszar powierzchni źródła. Inaczej mówiąc, obraz jest większy od źródła, i wzmocnienie µ = 1/detA jest co do wartości bezwzględnej większe od 1.
Jeżeli w jakimś punkcie wyznacznik macierzy A jest ujemny oznacza to, że otaczający go element powierzchni nie tylko zastanie zdeformowany w odwzorowaniu, ale również zostanie zmieniona jego skrętność. Obszary, w których detA<0 nazywamy obszarami o ujemnej parzystości, a te o detA>0, obszarami o dodatniej parzystości.
Skoro wyznacznik A może być dodatni bądź ujemny, to na płaszczyźnie obrazów mogą znaleźć się takie punkty, w których detA znika. Z racji tego, że w takim wypadku wzmocnienie µ staję się nieograniczone, takie punkty nazywamy punktami krytycznymi.
Daleko od soczewki, gdy b0 → ∞, a wartość kąta ugięcia α → 0, równanie na obrazy staje się identycznością. Wyznacznik macierzy deformacji A dąży do 1, czyli do wartości dodatniej. Widzimy więc, że punkty o ujemnej parzystości muszą tworzyć ograniczone obszary, na granicy których detA będzie znikał. Będą więc otoczone punktami krytycznymi, które utworzą zamkniętą krzywą. Będziemy ją nazywać krzywą krytyczną.
Może się zdarzyć, że wewnątrz obszaru o ujemnej parzystości znajdzie się obszar o dodatniej, wtedy granica między nimi (krzywa na której wyznacznik się zeruje), będzie również fragmentem krzywej krytycznej.
Równanie na obrazy daje nam prosty przepis, jak dla każdego punktu na
płaszczyźnie obrazów znaleźć odpowiadający mu punkt na płaszczyźnie
źródła. Posługując się tym odwzorowaniem, na płaszczyźnie źródła możemy
znaleźć każdy punkt, którego obraz leży na krzywej krytycznej. Otrzymaną w ten
sposób krzywą zamkniętą będziemy nazywać kaustyką.
Źródło punktowe leżące na kaustyce będzie miało obraz na krzywej krytycznej, stąd wzmocnienie takiego źródła będzie formalnie nieskończone. Każde źródło zbliżające się do kaustyki, będzie ulegało silnemu pojaśnieniu, które osiągnie maksimum w momencie przejścia.
Dodatkowo, każdemu przejściu przez kaustykę towarzyszy zginięcie lub powstanie dwóch obrazów. Gdy źródło znajduję się wewnątrz kaustyki i przybliża się do krawędzi, dwa z pośród wielu możliwych obrazów zbliżają się do siebie. Jeden z nich, o ujemnej parzystości, znajduje się wewnątrz krzywej krytycznej, a drugi leży po drugiej stronie krzywej krytycznej w obszarze dodatniej parzystości. Wraz z dążeniem źródła do kaustyki, oba obrazy dążą do jednego punktu krytycznego, w którym, po osiągnięciu maksymalnego wzmocnienia, znikną.
W przypadku punktowej soczewki, krzywą krytyczną jest pierścień Einsteina. Zazwyczaj mamy jeden obraz na zewnątrz i jeden wewnątrz.
Kaustyka są to wszystkie takie położenia źródła, których obrazy leżałyby na krzywej krytycznej. Tutaj, aby otrzymać obraz na pierścieniu, źródło musi leżeć dokładnie za soczewką. Ten punkt jest więc jedynym punktem kaustyki.
Wszystkie fizyczne źródła mają skończone rozmiary. Dlatego ich wzmocnienia powinniśmy szukać jako uśrednionego wzmocnienia po całej powierzchni, ważonego jasnością powierzchniową źródła. Szczęśliwie dla naszych oczu, taka średnia zawsze będzie skończona. Nawet jeśli część punktów źródła leży dokładnie na kaustyce, ich zbiór ma zerowe pole powierzchni; ilościowe rozważania pokazują, że uśrednione po skończonym obszarze zawierającym fragment kaustyki wzmocnienie jest zawsze skończone.
Gdy rozmiar źródła dąży do zera, wzmocnienie na kaustyce będzie dążyć do nieskończoności. Mechanika kwantowa nie pozwala nam zapomnieć o własnościach falowych materii i światła. Przy malejących rozmiarach źródła, w pewnym momencie przybliżenie optyki geometrycznej może przestać być wystarczające, gdyż zaczną grać rolę efekty interferencyjne, które wydajnie zmniejszą natężenie światła w wąskim snopie. Tylko matematycznie można sobie wyobrażać niemal nie ograniczone wzmocnienia.
Terminem soczewka podwójna będziemy nazywać układ dwóch mas leżących blisko siebie, na których następuje ugięcie światła pochodzącego od odległego źródła. W naturze takim obiektem może być gwiazda podwójna lub układ planetarny. Żądanie, aby obie masy leżały blisko siebie pozwoli w łatwy sposób znaleźć nam równanie na obrazy. Skorzystamy bowiem z przybliżenia cienkiej soczewki, zaprezentowanego w rozdziale 3.4.
Ogólna postać równania na obrazy zadana jest wzorem (4). Aby otrzymać równanie dla soczewki podwójnej, potrzeba jedynie znaleźć wyrażenie na kąt ugięcia α. Dla cienkiej soczewki kąt α jest sumą kątów Einsteina od każdego elementu masy. W omawianym, dyskretnym przypadku, będzie on równy:
| α= α1 + α2 + …, |
gdzie αi jest przyczynkiem od i-tej masy. Oznaczając przez bi→ położenie i-tej masy, za wzorem nr 2, możemy napisać:
| αi= − |
|
|
Równanie na obrazy dla soczewki podwójnej będzie miało następującą postać.
| 0 = |
| − |
| D |
| − |
| D |
| (12) |
Podobnie, jak w przypadku soczewki punktowej, stałe można zebrać do parametru o wymiarze długości - promienia Einsteina.
| rE= |
|
| , |
gdzie M = M1 + M2. Wprowadźmy bezwymiarowe masy obu składników.
| m1 = |
| m2 = |
| m1 + m2 = 1 (13) |
Przy tych oznaczeniach przepiszmy równanie (12).
| 0 = |
| − m1 rE2 |
| − m2 rE2 |
|
Promień Einsteina jest charakterystyczną skalą długości w równaniu. Jeżeli wyrazimy wszystkie wektory w jednostkach rE, otrzymamy bezwymiarowe równanie na obrazy. Przy oznaczeniach:
| 0 = |
|
| = |
|
| 1 = |
|
| 2 = |
| (14) |
Mamy:
| 0 = |
| − m1 |
| − m2 |
| (15) |
W przypadku tylko trochę bardziej złożonym od soczewki punktowej, otrzymaliśmy wyraźnie trudniejsze równanie. Nie da się go sprowadzić do równania jednowymiarowego, gdyż obie masy odchylają światło w innych kierunkach.
W problemie z pojedynczą masą, krzywa krytyczna była okręgiem o promieniu rE. Promień Einsteina był jedynym parametrem charakteryzującym układ. W tym zagadnieniu, krzywe krytyczne mogą przybierać różne kształty, a co za tym idzie, również kaustyki będą różne. Oprócz skali liniowej, wyrażonej przez rE, mamy jeszcze dwa wolne parametry: stosunek mas (q) i separacja składników (d).
W zależności od odległości między składnikami (d), krzywa krytyczna i kaustyki przyjmują 3 różne topologie. Zakładając stały stosunek mas (q) w układzie, prześledźmy ewolucję tych krzywych począwszy od d=0.
Gdy separacja składników jest równa zero mamy de facto przypadek soczewki punktowej, więc kaustyka jest jednym punktem leżącym dokładnie za soczewką, a krzywa krytyczna jest pierścieniem o promieniu Einsteina (część 3.5). Zwiększenie separacji (d) spowoduje przekształcenie punktowej kaustyki w małą, czterorożną krzywą zamkniętą pozostającą między obydwiema masami (bliżej cięższej). Dodatkowo pojawią się dwa dodatkowe ,,trójkątne” fragmenty kaustyki, które z rosnącym d, przybiegają z nieskończoności, coraz bliżej układu.
Krzywa krytyczna odpowiadająca jeszcze małemu, czterorożnemu fragmentowi kaustyki, mało będzie odbiegać od okręgu o promieniu Einsteina. Wraz z trójrożnymi kaustykami, pojawią się nowe fragmenty krzywej krytycznej, wewnątrz istniejącej krzywej.

Przy każdym stosunku mas mamy pewną separację składników, dla której wszystkie trzy fragmenty kaustyki się łączą w jedną krzywą zamkniętą. Podobnie obydwie wewnętrzne części krzywej krytycznej połączą się zewnętrzną krzywą i również powstanie jedna krzywa.
Kaustyka przyjmuje kształt seściorożnej ,,poduszki”, której szerokość rośnie wraz ze zwiększaniem się odległości między masami.
Pojawia się przewężenie zarówno w kaustyce jak i krzywej krytycznej. Przy dalszym wzroście separacji d (przy stałym q) przewężenie osiąga zerową szerokość. Dalszy wzrost separacji powoduje rozerwanie kaustyki na dwa osobne czterorożne fragmenty, a krzywej krytycznej na dwie owalne krzywe.
Przy rosnącej odległości między składnikami, oba fragmenty krzywej krytycznej będą coraz bliższe okręgom, a kaustyki będą malały i zbliżały się do odpowiadającym im mas.
W granicy cały układ możemy traktować jako dwie soczewki punktowe. Każdą masę będzie otaczała krzywa krytyczna w kształcie okręgu o promieniu odpowiadającemu wartości promienia Einsteina dla tej masy.
Gdy separacja składników jest bardzo duża, soczewka podwójna mało różni się od dwóch soczewek punktowych. Bez liczenia możemy się domyślać ilu obrazów źródła możemy się spodziewać.
Rozważmy źródło, które leży daleko od kaustyk i daleko od obydwu składników. Obecność pojedynczej masy dodawała nam jeden obraz tuż przy niej, wewnątrz pierścienia Einsteina. Teraz oprócz nieznacznie zdeformowanego głównego obrazu źródła, otrzymamy jeszcze dokładnie dwa obrazy, po jednym w pobliżu każdej z mas. Parzystość pierwszego obrazu będzie dodatnia, a dwu pozostałych ujemna. Przykładowe położenia obrazów są przedstawione na rysunku 10.
Figure 10: Trzy obrazy źródła punktowego w soczewkowaniu przez układ podwójny. Linią ciągłą oznaczone są kaustyki, przerywaną krzywa krytyczna. Punkt S to źródło, a I1, I2 i I3 - obrazy.
Tak jak wcześniej zauważyliśmy (część 3.5), liczba obrazów może się zwiększyć, bądź zmniejszyć o dokładnie 2, a następuje to tylko gdy źródło przekracza kaustykę. Dopóki tak się nie stanie, źródło będzie miało dokładnie trzy obrazy.
Figure 11: Soczewkowane przez układ podwójny źródło (punkt S) leży wewnątrz kaustyki, ma wtedy pięć obrazów (punkty I1, I2, I3, I4, I5).
Dla układów podwójnych, kaustyka składa się z jednego, dwóch, bądź trzech rozdzielonych fragmentów, które są zamknięte i nie zawierają się w sobie (patrz część 4.2). Wchodząc ze źródłem do wnętrza jednego fragmentu kaustyki, zwiększamy liczbę obrazów do pięciu. Wychodząc zmniejszamy do trzech. Jeżeli źródło znajduje się dokładnie na kaustyce, dwa spośród obrazów, leżą w tym samym miejscu, dokładnie na krzywej krytycznej. Gdy przesuniemy się do wnętrza kaustyki, te obrazy się rozsuną, gdy wyjdziemy na zewnątrz, oba znikną.
Sytuację gdy źródło leży wewnątrz kaustyki przedstawia rysunek 11.
Pomijając punkty dokładnie na kaustyce, możemy mieć tylko 3 lub 5 obrazów źródła punktowego. Dla źródeł o skończonym promieniu, zawsze gdy kaustyka przechodzi przez źródło, mamy do czynienia z maksymalnie czterema obrazami.
Jedna cześć źródła znajduję się na zewnątrz kaustyki i każdy jej punkt ma trzy obrazy. Natomiast reszta, która znajduje się wewnątrz, ma po pięć obrazów. Część źródła, która jest wewnątrz ma krawędź, która dotyka kaustyki. Dwa spośród pięciu obrazów tej części stykają się na krzywej krytycznej, odpowiadającymi krawędziami. Tworzą w ten sposób jeden spójny obszar.
Aby lepiej zrozumieć powyższe rozważania odwołajmy się do rysunku 12. Przedstawia on obrazy źródła podzielonego na koncentryczne pierścienie. Środek źródła ma 5 obrazów, ale widzimy, że przy rosnącym promieniu, dwa spośród nich się zlewają, tworząc de facto jeden obraz.
Figure 12: Wykres pokazuje jak, w zjawisku soczewkowania przez układ podwójny, zmieniają się obrazy źródła przy zmianie jego promienia. Widać, że gdy źródło nachodzi na kaustykę, dwa spośród pięciu obrazów, się łączą.
Każdy fragment kaustyki odpowiada łączeniu się innych par obrazów. Dlatego przy dostatecznie dużym źródle, które obejmie swoim polem więcej fragmentów kaustyki, więcej obrazów zleje się ze sobą. Źródło rozciągłe może mieć nawet jeden obraz.
Na rysunku 13 widać aż cztery obrazy w pobliżu lżejszej masy, które zlały się w jeden, oraz piąty obraz przy cięższej masie. Rysunek 14 pokazuje sytuację, w której wszystkie obrazy tworzą jeden obszar.
Figure 13: Źródło o największym promieniu ma tylko dwa obrazy.
Figure 14: Wystarczająco duże źródło może mieć nawet jeden obraz.
Dużym problemem w modelowaniu zjawiska mikrosoczewkowania przez układy podwójne jest podobna postać krzywych blasku, przy nawet bardzo różniących się parametrach układu. Odpowiedzialnym za to jest fakt, że mapy silnego wzmocnienia w okolicach kaustyk zależą niemalże jedynie od ich lokalnego kształtu. Małe fragmenty kaustyki, ,,dzióbki”, krawędzie, które mija lub przecina źródło, są podobne dla wielu konfiguracji układu. Dlatego też charakter zmienności może być podobny i trudno bez dokładnych obliczeń zdecydować z którym przypadkiem mamy do czynienia. Trzeba sprawdzać wiele możliwości. Przykładem takiej sytuacji mogą być krzywe przedstawione poniżej.
Zapiszmy równanie na obrazy dla soczewki podwójnej (15) w notacji zespolonej [Witt 1990]. Każdy wektor zastąpimy przez odpowiadającą mu liczbę zespoloną, np.:
| z0 = z0x + i z0y z = zx + i zy |
Będziemy mieli funkcję zespoloną z0 (z).
|
Punkt należy do krzywej krytycznej jeżeli dla niego wyznacznik macierzy deformacji znika.
| 0 = detA = det |
|
|
| = |
|
| − |
|
|
Policzenie tych pochodnych jest skomplikowane i czasochłonne, oraz prowadzi do równań zespolonych wysokiego
rzędu. Dlatego posłużymy się kilkoma trikami, żeby znaleźć prostsze równania na krzywą krytyczną.
Potraktujmy z0 jako funkcję z i z. Możemy formalnie wypisać wyrażenie na pochodne:
|
Gdzie wstawiliśmy:
| =1 |
| =1 |
| =i |
| =−i |
Z wzoru (17) widzimy, że ∂ z0/∂ z=1, więc z równań (18) i (19) otrzymujemy:
|
Porównując części rzeczywiste i urojone obu powyższych wyrażeń otrzymujemy pomocnicze zależności:
| = |
|
| + |
| =2 |
Bierzemy równanie (20) i mnożymy przez jego sprzężenie zespolone. Używamy również przed chwilą uzyskanych zależności.
| ⎛ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ |
| ⎞ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ | = 1− |
|
| + |
|
|
Prawą stronę równania możemy już zapisać używając wyznacznika macierzy deformacji.
| ⎛ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ |
| ⎞ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ | = 1− detA (22) |
Otrzymaliśmy w ten sposób równanie na detA. Przyrównajmy go do 0 i wstawmy już znany związek 1=∂ z0/∂ z.
| 2 − |
| ⎛ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ |
| ⎞ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ | = 0 |
Rozwiązaniem jest każdy punkt, który dla pewnego φ, spełnia równanie:
| = |
| eiφ |
Sprzężenie zespolone daje nam:
| ⎛ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ |
| ⎞ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ | = e−iφ |
Pochodną łatwo już policzyć z równania na obrazy (17).
| + |
| = e−iφ (23) |
Ostatecznie dla każdego φ od 0 do π/2 otrzymujemy inne równanie zespolone czwartego stopnia, którego każdy pierwiastek leży na krzywej krytycznej.
Aby otrzymać kaustyki, trzeba tylko wyliczoną krzywą krytyczną przenieść na płaszczyznę źródła przy pomocy równania na obrazy (17).
Opisaną powyżej metodą wyznaczałem kaustyki i krzywe krytyczne dla wszystkich modeli soczewek liczonych w ramach tej pracy. W tej części opiszę jak wyznaczałem wzmocnienia.
Pracujemy wciąż z równaniem na obrazy w postaci zespolonej
(17). Ustalmy układ współrzędnych tak, aby obie masy
składające się na soczewkę leżały na osi rzeczywistej. Dzięki temu
z − z2 = z − z2 . Przesuńmy
również środek układu, by spełnione było równanie
| m1z2 + m2z1 = 0 |
Wtedy, pamiętając że mieliśmy m1 + m2 = 1 , możemy z równania na obrazy wyeliminować te współczynniki.
| z0 = z − |
| (24) |
Aby wyznaczyć wzmocnienie µ źródła punktowego musimy wyznaczyć wyznacznik macierzy A. Przypomnijmy sobie wzór (22), który otrzymaliśmy w poprzedniej części.
| detA = 1− |
| ⎛ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ |
| ⎞ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ |
Teraz wystarczy, że będziemy znali wartość pochodnej ∂ z0/∂ z. A ją otrzymamy z równania (24).
| = |
| ⎛ ⎜ ⎜ ⎜ ⎜ ⎝ |
| − |
| − |
| ⎞ ⎟ ⎟ ⎟ ⎟ ⎠ |
Z tego wzoru, znając położenie obrazu można wyznaczyć jego wzmocnienie. W ten sposób liczyłem wzmocnienia na potrzeby modeli, krzywych i rysunków prezentowanych w tej pracy.
Procedura wyznaczająca położenia obrazów jest iteracyjna i wymaga podania początkowych rozwiązań. Licząc całe przejście źródła w tle soczewki, rozpoczynamy od najdalszego jego położenia. Daleko od soczewki mamy 3 obrazy, jeden blisko źródła, a dwa w pobliżu obydwu mas. Za początkowe położenia obrazów (i1, i2 i i3) bierzemy przybliżone rozwiązania analityczne.
|
Rozwiązania pochodzą z pracy [Witt 1993, równania 11-13].
W każdym następnym kroku, gdy nieco przesuniemy położenie źródła, za początkowe rozwiązania bierzemy te z kroku poprzedniego. Dochodzenie do poprawnych położeń jest prowadzone przez iteracyjne wykonywanie schematu Newtona dla równania na obrazy (24). Nie jest zagadką, że wychodząc z trzech pierwiastków, w efekcie znajdziemy nie więcej jak trzy rozwiązania. Wychodząc od pięciu, możemy otrzymać pięć. Gdy przesuwamy źródło w tle soczewki, może ono w pewnym momencie przejść przez kaustyki i zmienić liczbę swoich obrazów. Dlatego po otrzymaniu wszystkich rozwiązań metodą Newtona sprawdzamy, czy jakieś dwa obrazy nie zlały się i nie zniknęły przy wyjściu poza kaustykę. Później, aby wykryć moment przejścia przez kaustyki z dodaniem obrazów, jeżeli liczba rozwiązań jest mniejsza od pięciu, próbujemy szukać pozostałych. Przy wykorzystaniu znanych pierwiastków, obniżany jest rząd równania. Wynikowe równanie jest, co najwyżej drugiego rzędu, stąd możliwe jest jego algebraiczne rozwiązanie. Ewentualne nowe obrazy są dodawane do pozostałych i wszystkie są przekazywane na zewnątrz, a przy następnym uruchomieniu procedury posłużą jako rozwiązania początkowe.
Tak, jak już wcześniej było wspomniane w części 3.3.2, dotyczącej obrazów rozciągłego źródła dla soczewki punktowej, obrazy punktów leżących na brzegu źródła będą tworzyć obwiednie wszystkich obrazów źródła. Dlatego, aby znaleźć wzmocnienie obrazów, czyli ich pole powierzchni, wystarczy wyznaczyć te obwiednie (patrz również [Gould & Gaucherel 1997, Dominik 1998]).
Procedura licząca wzmocnienia źródła kołowego o skończonym promieniu dzieli jego obwód na 25 punktów. Osobno liczy liczbę i położenia obrazów każdego punktu na obwodzie. Jeżeli liczba obrazów jest stała oznacza to, że żaden fragment źródła nie zahacza o kaustyki. Wszystkie te punkty są obwiedniami obrazów naszego źródła. Pozostaje tylko je połączyć dla każdego obrazu z osobna zważając, aby składały się z punktów o tej samej parzystości oraz żeby same ze sobą ani z innymi obrazami, się nie przecinały. Pole powierzchni otrzymanych obwiedni jest pełnym wzmocnieniem źródła.
Sytuacja się nieco komplikuje, gdy obiegając źródło natrafiamy na przejście przez kaustykę. Ponieważ okolicom kaustyki towarzyszą zawsze duże wzmocnienia, wynik uzyskany dla 32-kąta foremnego może odbiegać od tego dla kołowego źródła. Wtedy procedura stara się dwukrotnie zwiększyć liczbę podziałów obwodu. Jeżeli zmieni to w sposób znaczący jasność jakiegokolwiek obrazu, zabieg jest powtarzany.
Metoda jest trudna do zakodowania, gdyż wiele kroków może się nie powieść. Wymaga to dużego kunsztu, aby obsłużyć wszystkie błędy i w sposób czytelny zwrócić informację o powodach i miejscu ich wystąpienia. Największym problemem podczas modelowania danego przejścia jest liczba komunikatów. Dla każdego punktu obserwacyjnego na krzywej zmian blasku trzeba policzyć wzmocnienie. Przy liczbie obserwacji rzędu stu, przy jednym przejściu może pojawić się kilka błędów. Aby znaleźć optymalny model soczewki, która odtwarzałaby doświadczalną krzywą, należy przeliczyć to kilkaset razy. Przy takiej liczbie błędów jaka może wystąpić, bez gruntownych inspekcji i opracowanych procedur trudno być pewnym otrzymanego modelu.
Do określenia całego zjawiska soczewkowania przez układ podwójny, potrzebujemy znacznie więcej parametrów niż w przypadku jednopunktowej soczewki. Po pierwsze zniesiona jest degeneracja ze względu na kierunek ruchu źródła. Wprowadzamy kąt przejścia β mierzony w płaszczyźnie nieba pomiędzy rzutem trajektorii źródła a rzutem odcinka łączącego składniki soczewki. Po drugie musimy wprowadzić dwa parametry określające fizycznie soczewkę, czyli separację składników d oraz stosunek ich mas q.
Pamiętamy, że tak jak w przypadku punktowym, krzywa blasku nie niesie informacji o liniowych rozmiarach obiektów, dlatego wszystkie parametry o wymiarach długości wyrażamy w promieniach Einsteina rE, którego zmierzenie jest na ogół niemożliwe. Parametr zderzenia b, separacja składników soczewki d oraz promień źródła rS, są takimi bezwymiarowymi parametrami.
Aby odtworzyć obserwowaną krzywą blasku musimy wprowadzić jeszcze dwa parametry o wymiarze czasu. Mogą to być: długość zjawiska, liczona jako czas w którym źródło pokona odległość jednego promienia Einsteina, tzw. czas Einsteina tE oraz moment w którym źródło przejdzie najbliżej środka masy tCM. Gdy mamy widoczne przejścia przez kaustyki, powyższą parę można zastąpić momentami przejść, które mogą być lepszymi parametrami dla efektywnego poszukiwania modelu w niektórych sytuacjach. Moment przejścia koło środka masy oraz czas Einsteina są jednak bardziej ogólne i korespondują z analogicznymi parametrami w przypadku pojedynczej soczewki, toteż dla określania modeli są wygodniejsze.
Uwzględnienie wpływu paralaksy ziemskiej na obserwowaną jasność zjawiska wymaga kolejnych parametrów podlegających dopasowaniu. Gdy źródło jest duże w porównaniu z obszarami silnego wzmocnienia, przewidywana jasność może silnie zależeć od profilu pociemnienia brzegowego soczewkowanej gwiazdy lub odchylenia jej kształtu od sferycznego. W symulacjach na potrzeby tej pracy opartej na danych OGLE, używane były podstawowe parametry: stosunek mas, separacja składników, parametr zderzenia, kąt przejścia, czas Einsteina, czas przejścia najbliżej środka masy oraz, szczególnie ważny dla tej pracy – promień źródła. Taką siódemkę parametrów będziemy nazywać modelem zjawiska.
Dla każdego zestawu siedmiu parametrów określających zjawisko, przy użyciu wcześniej opisanych metod obliczeń, można narysować krzywą wzmocnienia źródła. Aby otrzymać krzywą blasku wyrażoną w magnitudo trzeba jeszcze znaleźć bezwzględny strumień źródła FS oraz strumień niepodlegający wzmocnieniu FB. Składa się na niego tło nieba, wszystkie obiekty w pobliżu, które dały wkład do fotometrii oraz ewentualnie światło od samej soczewki.
Dobroć modelu opisuję funkcją χ2, którą minimalizuję w poszukiwaniu najlepszych dopasowań. Punkty obserwacyjne przeliczam z magnitudo na strumienie Fobs, np. tak, że jedna jednostka strumienia odpowiada mag=21. Zakładając, że znamy strumienie FS i FB oraz wzmocnienie µ przewidywany strumień obserwowany możemy zapisać następująco:
| F=FB+µ FS = F0 + ( µ −1 )FS |
gdzie wprowadziliśmy strumień ,,bazowy” F0=FB+FS. Funkcja χ2 dla modelu ma postać:
| χ2= |
| ⎛ ⎜ ⎜ ⎝ |
| ⎞ ⎟ ⎟ ⎠ |
| = |
| ⎛ ⎜ ⎜ ⎝ |
| ⎞ ⎟ ⎟ ⎠ |
| (25) |
gdzie σ jest błędem fotometrii a indeks i numeruje kolejne obserwacje.
Założyliśmy, że znamy strumienie i gdy żądamy aby χ2 było minimalne, tak w rzeczywistości jest. Bo gdy jesteśmy w minimum funkcji, wszystkie jej pierwsze pochodne muszą się zerować. Zażądajmy więc aby
| =0 |
| =0 |
Te dwa równania (liniowe ze względu na FS i F0) dają się rozwiązać analitycznie. Wynikiem będą wartości strumieni FS i F0, które możemy otrzymać dla każdego modelu teoretycznego.
Model (siódemka parametrów) w jednoznaczny sposób określa zmiany wzmocnienia w czasie, co wraz z wartościami strumieni daje teoretyczną krzywą blasku. Porównanie jej z obserwacyjną krzywą przeprowadzałem poprzez wyliczenie wartości funkcji χ2 (wzór 25). Aby znaleźć model najlepiej pasujący do danych, poszukiwałem takiego, dla którego χ2 jest najmniejsze. Proces ten nazwijmy minimalizacją.
Skoro dla każdego modelu można w sposób jednoznaczny wyliczyć wartość funkcji χ2, traktuję ją jako abstrakcyjną funkcję siedmiu zmiennych, która może podlegać minimalizacji standardowym algorytmem, do zastosowania w wielowymiarowej przestrzeni. Dobrą stroną takiego rozwiązania jest to, że w poszukiwaniu minimum program przemieszcza się w przestrzeni w sposób dowolny, nie będąc przywiązany do wyboru konkretnej bazy.
Do obliczeń w ramach tej pracy wybrałem algorytm minimalizujący funkcję metodą Powella. Do jednowymiarowej optymalizacji użyłem metody Brenta (opisy znaleźć można w książce ,,Numerical Recipes in C”; [Press et al. 1988,1992]). Metoda Powella jest metodą wyboru kierunków; startując z pewnego punktu i mając zadaną początkową bazę n-wymiarową, szuka minimów wzdłuż każdego kierunku bazy i na podstawie zdobytych informacji przesuwa punkt i poprawia zestaw kierunków dla następnej iteracji. Dzięki temu w sposób efektywny potrafi poruszać się nawet w wąskich ,,dolinach”, których kierunki nie zawsze są zgodne z wektorami bazy.
Największą trudnością w minimalizowaniu modeli zjawisk soczewkowania przez układy podwójne okazało się silne ,,pofalowanie” powierzchni χ2 - mnogość lokalnych minimów o dużej głębokości i w kilku skalach zmienności parametrów. Jest kilka powodów takiego zachowania. Przerwy w danych obserwacyjnych, które w sposób wybiórczy próbkują momenty silnego wzmocnienia więc testują model tylko w pewnych punktach, dopuszczając duże zmiany w pozostałych. Bardzo stroma zależność wzmocnienia od odległości od kaustyki, połączona z małymi błędami fotometrii dla jasnych obiektów powoduje silne wahania wartości χ2 w obszarach przestrzeni parametrów decydujacych o szczegółach przejścia źródła w pobliżu/przez kaustyki. Na to nakłada się mała stabilność każdorazowego dopasowania strumieni źródła i tła.
Algorytm w sposób chaotyczny przeskakuje między lokalnymi minimami i nie ma pewności czy to, które ostatecznie wybrał jest najniższe. Przeszukiwanie należy wtedy rozpocząć z kilku punktów w okolicy i jednocześnie ustalić bardzo małą początkową skalę zmienności parametrów, w której poszukujemy minimum. Program po kilku iteracjach wykryje kierunki, w których zależność jest łagodna, i w nich zwiększy skale, tym samym poprawiając efektywność poszukiwania minimum.
Przeszukiwanie siedmioparametrowej przestrzeni jest kosztowne, a wobec opisanych komplikacji może zajmować jeszcze kilkakrotnie więcej czasu komputerowego niż w typowych przypadkach. Jest to jednak jedyna metoda uzyskania informacji na temat parametrów modelu takich jak stosunek mas, czy względne rozmniary źródła.
W części 3.5 zauważyliśmy, że wzmocnienie źródła punktowego, które zbliża się do kaustyki silnie rośnie, by na niej stać się nieskończone. Dla źródła rozciągłego uśredniamy wzmocnienie po całej jego powierzchni, dlatego przebieg zmienności jest mniej dramatyczny. Im większe źródło, tym maksymalne wzmocnienie przy przejściu przez kaustykę jest mniejsze, bo źródło obejmuje obszary położone dalej. Wcześniej za to zaczyna się wzrost jasności związany z bliskością kaustyki. Nachylenie zmian jasności jest mniejsze dla dużych źródeł. Rysunek 15 pokazuje przebiegi zmian jasności dla kilku różnych promieni źródła przy przechodzeniu przez kaustykę.
Figure 15: Krzywa jasności źródła o czterech różnych promieniach przy przechodzeniu przez kaustykę. Im większe źródło tym wcześniej rozpoczyna się wzrost jasności, ale jest bardziej wygładzony i niższy.
Jeżeli w czasie przebiegu soczewkowania zaobserwowaliśmy cały profil silnego wzmocnienia charakterystycznego dla przejścia źródła przez kaustykę, wtedy drogą dopasowania możemy wyznaczyć promień źródła. Jednak wymaga to, aby obserwacje leżały zarówno po stronie wzrostu jak i spadku jasności oraz aby dobrze pokrywały cały kształt krzywej blasku łącznie z momentem maksymalnego wzmocnienia. Niestety przejście przez kaustykę zazwyczaj trwa bardzo krótko, i przeszkodą w obserwacjach może być niewłaściwa pora dnia, a także trudność z przewidzeniem momentu przejścia na podstawie kształtu wcześniejszych zmian blasku. To wszystko skutkuje tym, że tylko w nielicznych przypadkach udaje się zdobyć wystarczająco dużo obserwacji tego fragmentu krzywej blasku.
Dla większości zaobserwowanych zjawisk nie da się zatem wyznaczyć promienia źródła metodą dopasowania przejść przez kaustyki. Dlatego przy poszukiwaniu parametrów opisujących dane zjawisko, pomija się często rozmiar źródła, traktując je jako punktowe. Jest to bardzo efektywne podejście, ponieważ daleko od kaustyki wzmocnienie źródła bardzo słabo zależy od jego rozmiarów. Pozwala to również ograniczyć wymiar przestrzeni przeszukiwanych parametrów, więc zredukować całkowity koszt obliczeniowy.
Problem pojawia się, gdy mamy do czynienia z dużym źródłem i jedną bądź dwiema obserwacjami o silnym wzmocnieniu. Tym obserwacjom mimo ich silnego wzmocnienia może odpowiadać źródło, którego brzeg leży w małej ale skończonej odległości od kaustyki. Użycie przy modelowaniu źródła o zbyt małych rozmiarach "wymusi" przesunięcie kaustyki w kierunku źródła. Może to spowodować kilkuprocentowe błędy w dopasowaniach innych parametrów modelu.
Jak już pisałem we wstępie wśród zjawisk mikrosoczewkowania grawitacyjnego odkrywanych przez OGLE zdarzają się takie, których krzywa blasku wskazuje na to, że zostały one spowodowane przez układ podwójny. Modele tych zjawisk, zawierające opisy parametrów układu i trasy źródła, są na bieżąco opracowywane [Jaroszyński 2002, Jaroszyński et al. 2004]. W tej pracy jako dane wejściowe posłużyły mi krzywe blasku dwudziestu kilku zjawisk z roku 2002 i 2003 pochodzące z EWS. Parametry modeli opisujących te obserwacje zostały dopasowane przez prof. Jaroszyńskiego w pracy z 2004 roku. Wśród nich są dwa parametry opisujące soczewkę – nie rotujący układ podwójny (q i d), dwa geometryczne (kąt β i odległość b) oraz dwa o wymiarze czasu – moment największego zbliżenia (tCM) i czas Einsteina (tE), a także strumienie tła (F0) i źródła (FS). Nie udało się natomiast wyznaczyć promieni soczewkowanych obiektów.
Ponieważ strumienie są wyliczane metodą analityczną (opisaną w części 6.2) tylko sześć parametrów podlega bezpośredniej minimalizacji. Takie modele nazywamy 6+2 parametrowymi, a modele, które uwzględniają jeszcze promień źródła – 7+2 parametrowymi.
Moim zadaniem było zbadanie czy w przypadku niewystarczającej liczby danych, można jednak znaleźć jakieś ograniczenia na promień źródła. Metoda poszukiwań polegała na dopasowaniu do obserwacji modeli o różnych promieniach i porównaniu dla nich wartości χ2. Rozpoczynałem od modelu o promieniu równym 0 i sukcesywnie zwiększałem jego wartość począwszy od rS=0,0001, aż do 0,1 w dwustu krokach. Dla każdego modelu o zadanym już promieniu dokonywałem minimalizacji w przestrzeni pozostałych 6+2 parametrów. W każdym następnym kroku jako model wyjściowy służył ten uzyskany poprzednio. W ten sposób otrzymałem zależności najmniejszego χ2 od zadanego promienia rS. Jeżeli dla pewnych wartości promienia następowałoby wystarczająco duże obniżenie χ2 oznaczałoby to, że prawdziwa wartość rS najprawdopodobniej leży w tym przedziale.
Zależność dopasowania modelu od jednego parametru z jednoczesną optymalizacją ze względu na pozostałe można badać porównując go z modelem o najlepszym dopasowaniu. Ilościowo opisuje to wyrażenie Δ χ2=χ2−χ2min o rozkładzie χ2 z jednym stopniem swobody [Press et al. 1988,1992, rozdział 15.6]. Prawa statystyki pozwalają oczekiwać, iż z prawdopodobieństwem 68,27% rzeczywisty model zjawiska odpowiada wartości Δχ2 ≤ 1, a z prawdopodobieństwem 99,7% – wartości Δχ2 ≤ 9.
Jak można było oczekiwać, dla największych zadanych promieni źródeł żaden rozsądny model nie dawał się dopasować i χ2 stawało się bardzo duże. Dla bardzo małych promieni, rzędu 10−4, χ2 było niemalże równe wartości dla modelu zerowego. Przedział badanych modeli był więc odpowiedni dla posiadanych danych obserwacyjnych.
Ciekawym wynikiem jest to, że dla 16 spośród 21 zbadanych zjawisk χ2 jest monotonicznie rosnącą funkcją promienia źródła i tym samym nie można ograniczyć jego rozmiarów od dołu. Dla dwóch zjawisk obniżenie było na poziomie Δ χ2 = 2, co również nie pozwala wyciągnąć ostatecznych wniosków. Krzywe blasku kolejnych dwóch zjawisk miały widoczny wpływ paralaksy ziemskiej, a ponieważ nie uwzględniałem tego efektu w moich modelach, χ2 dopasowania było bardzo duże, a w takich wypadkach trudno używać Δχ2 do porównywania jakości dopasowań modeli.
Dla wszystkich zjawisk udało się natomiast znaleźć ograniczenia od góry na promień źródła. Tabela 1 dla każdego zjawiska przedstawia wartość promienia przy którym χ2 przekroczyło o 1 i o 9 wartość dla najlepszego modelu.
Table 1: Górne ograniczenia na promień źródła. W kolumnach: rok odkrycia, numer przydzielony zjawisku w danych OGLE, promień źródła przy którym χ2 przekracza o 1 oraz o 9 wartość dla najlepszego dopasowania
Rok Zjawisko rsΔ χ2>1 rsΔ χ2>9 2002 051 0,0012 0,006 2002 099 0,008 0,015 2002 114 0,009 0,014 2002 135 0,0065 0,012 2002 158 0,07 0,14 2002 256 0,0012 0,009 2002 321 0,04 0,06 2003 021 0,0008 0,0019 2003 056 0,016 0,03 2003 124 0,02 0,04 2003 135 0,0065 0,012 2003 200 0,0028 0,0055 2003 235 0,014 0,026 2003 236 0,0008 0,007 2003 260 0,0008 0,0015 2003 291 0,0002 0,0005 2003 340 0,0092 0,013 2003 380 0,003 0,007 2005 071 0,0014 0,0018 0,001 0,0017
Poniżej znajdują się dwa przykłady monotonicznych zależności między wartością χ2 a promieniem źródła, dla dwóch zjawisk spośród wymienionych w tabeli.
Kolejny przykład pokazuje schemat zjawiska OGLE-2002-BLG-051 i krzywe blasku dla dwóch modeli: najlepszego dla rS=0 oraz modelu w którym dopasowanie się ,,psuje” dla rS=0,012. Mamy tylko jedną obserwację, w fazie największego wzmocnienia. Widzimy, że jeden dodatkowy punkt pozwoliłby na znalezienie dużo lepszego ograniczenia na promień.
Zjawisko OGLE-2005-BLG-071 przypisywane pozasłonecznemu układowi planetarnemu [Udalski et al. 2005], posiada dwa modele zgodnie ze znaną degeneracją ze względu na separację składników soczewki. Środkowe fragmenty kaustyki przyjmują bardzo podobne kształty dla separacji równej d i 1/d, dlatego krzywe zmian blasku mogą wyglądać niemalże identycznie [Dominik, M. 1999]. Tak było w tym przypadku, co więcej okazuje się że oba modele miały prawie taką samą zależność χ2 od promienia źródła. Dla rS=0,0006 można zobaczyć nieznaczne obniżenie χ2 o około 2, które kończy się przy około 0,0012, tak by już dla 0,0018 (model bliski) i 0,0017 (model szeroki) przekroczyć najmniejszą wartość o 9. Na podstawie tak nieznacznego minimum nie można wyciągnąć wiążących wniosków o promieniu źródła.
Wykresy poniżej przedstawiające zależność χ2 od promienia odpowiadają dwóm opisywanym modelom.
OGLE-2002-BLG-069 i OGLE-2003-BLG-267 mają wyraźnie zaznaczony wpływ paralaksy i bardzo duże χ2. Niemniej interesujące jest, że oba dopasowania poprawiły się po zwiększeniu promienia źródła. Dla zjawiska nr 267 najlepsze dopasowanie przypada na przedział 0,0008 < rS <0,0009 i jest to wynik spójny z wcześniejszymi modelami bez uwzględnienia paralaksy i rotacji [Jaroszyński et al. 2004, Jaroszyński et al. 2005], różni się jednak dramatycznie od modeli liczonych po ich uwzględnieniu [Jaroszyński et al. 2005].
W przypadku nr 069, minimum χ2 występuje dla promieni 0,003 < rS <0,004. Jest to bardzo ciekawy wynik, gdyż jest tego samego rzędu wielkości jak wartość 0,0048 uzyskana na podstawie dokładnego modelowania przejść przez kaustykę z danych z jeszcze pięciu innych teleskopów [Kubas et al. 2005].
Opisywane zależności są przedstawione na poniższych wykresach.
W przebiegu χ2 dla zjawiska OGLE-2003-BLG-021 również można znaleźć nieznaczne obniżenie wartości χ2 w przedziale 0,0013<rS<0,0015. Głębokość jego nie przekracza jednak Δ χ2=2, wynik może być niepewny.
Nie znalazłem ograniczenia od dołu na promień źródła w zjawisku OGLE-2003-BLG-291 . Zarówno to jak i ograniczenie od góry na niskim poziomie 0,0005 wydaje się spójne z wcześniej opublikowanym dokładniejszym modelem uwzględniającym paralaksę i rotację [Jaroszyński et al. 2005].
Warto jeszcze zwrócić uwagę na przypadek OGLE-2002-BLG-158 , w którym Δ χ2 przekracza 1 dla bardzo dużego promienia rS=0,07. Brak silnego ograniczenia jest spowodowany tym, że przejście przez róg kaustyki nie jest pokryte obserwacjami i dobre dopasowanie może dać zarówno model małego źródła z bardzo silnym wzmocnieniem, jak i dużego, które minie róg i wytworzy gładką zmienność na tym odcinku krzywej.
Rysunek 16 przedstawia przejścia źródła w tle soczewki oraz krzywe blasku dla dwóch wybranych modeli tego zjawiska, o promieniu źródła 0 i 0,7. Po prawej widzimy zależność dobroci dopasowania w funkcji promienia.
Figure 16: OGLE-2002-BLG-158. Obserwacje na bardzo małym fragmencie krzywej tuż przy kaustyce, mają największe znaczenie dla określenia parametrów modelu. Tu ich brak spowodował, że dobre dopasowania dostajemy dla bardzo dużego zakresu promieni. Na rysunkach pokazane są najlepsze modele dla stałych wartości promienia rS=0 i rS=0,7.
Znalezione ograniczenia zależą w sposób skomplikowany od gęstości obserwacji, od kształtu kaustyk i geometrii zjawiska. Moim zadaniem było również zbadanie tej zależności.
Pierwsze pytanie brzmiało: Czy górne ograniczenia na promień źródła wyrażone w promieniach Einsteina można łatwo związać z odległością jaką źródło przebywa wewnątrz kaustyk? Wyznaczyłem długości drogi źródła, w której przebywa ono wewnątrz kaustyki, dla badanych zjawisk i odłożyłem na wykresie w funkcji ograniczenia na promień. Niestety wykres (poniżej po lewej) nie ujawnia prostej korelacji między tymi wartościami.
Drugie pytanie dotyczyło gęstości obserwacji. Czas Einsteina pomnożony przez dwa promienie źródła jest czasem, w którym pokonuje ono swoją średnicę. Jest więc miarą czasu przejścia źródła przez kaustykę. Ponieważ modele są bardzo czułe na obserwacje w okolicach przejścia można postawić hipotezę, iż znalezione ograniczenia na promień odpowiadają czasowej gęstości obserwacji, czyli w przypadku danych z rutynowych obserwacji OGLE – 1 dzień. Wykres po prawej przedstawia histogram czasu w jakim źródło pokona drogę o długości swojej średnicy wyliczonej na podstawie ograniczenia na rS dla Δ χ2=1. Widzimy, że te czasy są rzędu 1 dnia, średnia przypada na 1,57 dnia, natomiast nie są skupione wokół żadnej wartości.
Te rozważania prowadzą do wniosku, że górne ograniczenia na promień źródła nie są prostą funkcją ani ,,szerokości” fragmentu kaustyki przez jaki źródło przechodzi, ani częstości obserwacji. Oznacza to, że wyników wcześniej przedstawionej analizy promieni nie da się przewidzieć.
Krzywe blasku małych i dużych źródeł różnią się znacząco między sobą tylko w częściach odpowiadających zbliżeniom źródła do kaustyk. Potwierdzają to uzyskane przez nas wyniki. Gdy nie dysponujemy wystarczająco gęstymi danymi, dopasowania dla różnych promieni nie zmieniają znacząco wartości χ2 modelu zerowego. Zaproponowana metoda pozwala natomiast wyznaczyć górne ograniczenie na rozmiar źródła.
Należy pamiętać, że duży wpływ na oszacowania które uzyskamy mają
obserwacje zjawiska w stadium silnego wzmocnienia. Jeżeli brakuje nam
danych,
możemy mieć dobre dopasowania dla dużo szerszego przedziału promieni.
Ważnymi punktami na krzywej blasku, które pozwolą otrzymać silne górne
ograniczenia są punkty leżące tuż przed i tuż za silnym wzrostem przy
przejściu przez kaustykę. Nie uzyskamy w ten sposób ograniczeń dolnych.
Powyższe wyniki i ich spójność z innymi opracowaniami pokazują, że
w zjawiskach mikrosoczewkowania grawitacyjnego przez układy podwójne
warto próbować dopasowywać rozmiary źródła nawet gdy nie dysponujemy
,,idealnymi” obserwacjami. Można to przeprowadzić metodą zaprezentowaną
w tej pracy.
Poznanie metod modelowania zjawisk soczewkowania grawitacyjnego przez układy podwójne wymaga przebycia długiej drogi: począwszy od zrozumienia podstawowych faktów i przybliżeń, przez wyprowadzenia szczegółowych wzorów, a skończywszy na metodach otrzymywania poszczególnych obrazów źródła oraz dopasowywaniu krzywych blasku do obserwacji. Większość tej pracy poświęciłem opisowi tej drogi, ponieważ prawdziwa wiedza wymaga podstaw, a z nimi łatwo dojść do wszelkich wyników. Informacje zawarte w kolejnych rozdziałach w efekcie dają podstawy do samodzielnego stworzenia procedur, którymi można by otrzymać modelowe krzywe blasku zjawisk soczewkowania grawitacyjnego.
Poniżej przypominam najważniejsze treści zawarte w poszczególnych częściach
pracy.
We wstępie opisałem m.in. jakie przejawy soczewkowania możemy obserwować
we Wszechświecie oraz czego możemy się dowiedzieć badając je. W rozdziale 2 wprowadziłem najważniejsze przybliżenie
w teorii soczewkowania – przybliżenie słabego pola grawitacyjnego, co
pozwoliło zdefiniować pojęcia płaszczyzn soczewki i źródła. Schematy
w tej i następnej części prezentują geometrię zjawiska. Rozdział 3
poświęciłem na wyprowadzenie podstawowego równania
– równania na obrazy oraz zdefiniowanie pojęcia wzmocnienia. Znajduje
się tam również szczegółowe rozwiązanie dla przypadku soczewki punktowej
wraz z dyskusją wzmocnień i szeregiem wykresów pozwalających dokładniej
zrozumieć problem. Wprowadzenie pojęcia macierzy deformacji pozwoliło
zdefiniować krzywą krytyczną i kaustykę. Przechodząc do wąskiego tematu pracy,
w rozdziale 4 zapisałem równanie
na obrazy dla podwójnej soczewki grawitacyjnej. Omówiłem również
szczegółowo dla tego przypadku kształty kaustyk i krzywych krytycznych,
położenia obrazów źródeł punktowych oraz położenia i kształty obrazów
źródeł rozciągłych. Znajduje się tam kilka przykładów krzywych blasku
powstających w trakcie tego typu zjawiska. Jednym z ważniejszych rozdziałów
jest rozdział 5. Zawiera on wszystkie ważne wzory,
na podstawie których można wyliczyć wzmocnienia i położenia obrazów
zarówno punktowych jak i rozciągłych źródeł. Przytaczam także nietrywialne
wyprowadzenie, wygodnego do
obliczeń numerycznych, równania opisującego krzywą krytyczną. W rozdziale 6 wprowadzam
parametry używane przy modelowaniu krzywych
blasku. Opisuję także samą metodę dopasowywania modelu do obserwacji,
ze szczególnym uwzględnieniem strumieni źródła i tła, które wyznaczane są
analitycznie.
Dopiero dysponując opisanym we wcześniejszych rozdziałach aparatem można przejść do rozdziału 7. Rozdział ten opisuje problemy z wyznaczaniem promieni źródeł w zjawiskach mikrosoczewkowania przez układy podwójne oraz proponuje metodę wyznaczenia bądź nałożenia ograniczeń na możliwe wartości tego parametru w przypadku zjawisk o słabym pokryciu przez obserwacje. Metoda zastosowana jest do zjawisk badanych wcześniej z pominięciem wyznaczania rozmiarów źródeł. Zawiera wyniki otrzymane po wielotygodniowych obliczeniach prowadzonych na 7 komputerach w Obserwatorium Astronomicznym UW, a dotyczących 21 zjawisk mikrosoczewkowania w Galaktyce zaobserwowanych przez zespół OGLE.
Wyniki dotyczące modelowania promieni źródeł można podsumować
następująco. Jeśli obserwacje nie pokrywają dostatecznie gęsto
krzywej zmian blasku w trakcie tzw. przejścia przez kaustykę lub
zbliżenia do jej rogu, niemożliwe na ogół jest ograniczenie rozmiarów
źródła od dołu. Ograniczenia od góry są możliwe.
Nie ma prostych korelacji między ograniczeniami górnymi na
promień, otrzymanymi proponowaną metodą, a rozmiarem kaustyki. Czas
pokonania swojej średnicy przez źródło o największym dopuszczalnym
rozmiarze, nie jest tylko funkcją gęstości obserwacji. Nie
udało się mam sformułować zatem żadnego fundamentalnego prawa
rządzącego modelowaniem z uwzględnieniem promienia źródła. Niemniej fakt,
że udało się ograniczyć od góry rozmiary źródeł, oraz że wyniki są
spójne z innymi opracowaniami (np. z pracami opartymi na bogatszym
materiale obserwacyjnym pochodzącym z wielu teleskopów) pokazuje, iż
podobna analiza w przypadku innych zjawisk o niedostatecznym pokryciu
przez obserwacje może dać interesujące oceny rozmiarów źródeł.
Efektem tej pracy nad modelowaniem zjawisk soczewkowania przez układy
podwójne jest również program graficzny,
który w sposób interaktywny pomaga
szukać trudnych rozwiązań tego problemu. Wyświetlane przy jego użyciu
położenia i kształty obrazów, kaustyki oraz krzywe blasku na bieżąco
odzwierciadlają wszystkie modyfikacje parametrów zjawiska dokonywane przez
użytkownika. Opis działania programu znajduje się w załączniku do
pracy, a jego kod na załączonej płycie CDROM. Program może działać w środowisku
Linux z biblioteką gtkmm-2.4.
Aby lepiej zrozumieć zjawisko mikrosoczewkowania stworzyłem program graficzny, który wyświetla położenia i kształty i wzmocnienia obrazów soczewkowanego źródła oraz potrafi wyliczyć krzywą zmian blasku dla dowolnego przejścia obiektu w tle soczewki. Użytkownik może modyfikować wszystkie parametry zjawiska na bieżąco obserwując wyniki.
Procedury numeryczne, które liczą kształty kaustyk i krzywych krytycznych, wzmocnienia źródeł punktowych oraz kształty i powierzchnie obrazów rozciągłych źródeł, używane w tym programie pochodzą od Shude Mao i były przezeń po raz pierwszy stosowane w pracy [Mao 2001].
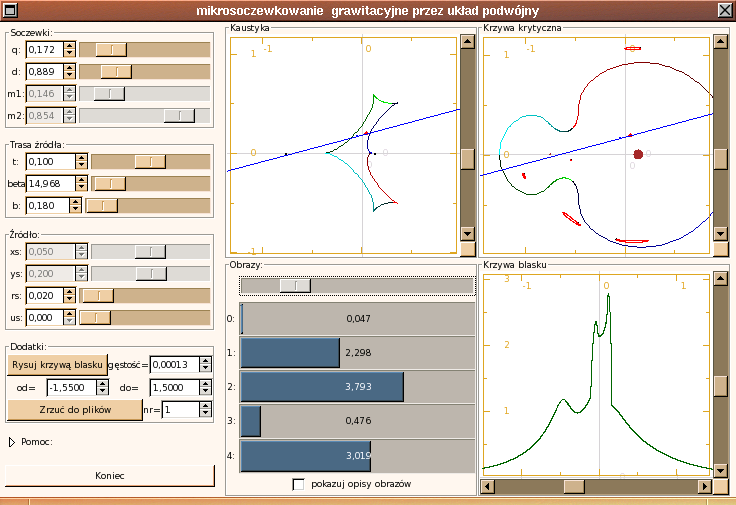
Figure 17: Okno programu. Po lewej znajduje się panel sterowania, w którym można ustawiać parametry soczewki oraz trajektorii źródła, a także zapisać do plików wyliczone obrazy i krzywą blasku. Po prawej są cztery panele, górne to płaszczyzna soczewki i płaszczyzna źródła, a dolne to krzywa blasku oraz wzmocnienia poszczególnych obrazów.
Najważniejszymi parametrami są te, które określają samą soczewkę. Ograniczam się do statycznego układu podwójnego, więc do jego opisu wystarczą dwie wartości: q – stosunek mas składników układu oraz d – odległość między składnikami. Jak wszystkie parametry o wymiarze długości w zagadnieniach soczewkowania, separacja składników jest wyrażona w promieniach Einsteina. Podanie stosunku mas pozwala wyliczyć masy obu składników w jednostkach masy całego układu, tzn. że zawsze m1+m2=1. Na wykresach oba składniki układu zawsze leżą na osi poziomej, a środek masy wyznacza początek układu współrzędnych.
Trajektorię źródła określają dwa parametry. Kąt β jaki tworzy z dodatnią półosią osi X, oraz parametr zderzenia b, czyli najmniejsza odległość między prostą a środkiem masy układu. Położenie źródło na trajektorii jest opisane przez liczbę t, przy czym t=0 odpowiada punktowi najbliżej do środka masy. Podanie parametru t oraz ustalenie trasy źródła jednoznacznie wyznacza jego położenie, oznaczane przez ( xs, ys).
Program uwzględnia jeszcze dwie cechy źródła: promień rs oraz standardowe pociemnienie brzegowe, opisywane przez us. Dla podanego us jasność powierzchniowa źródła w zależności od odległości od jego środka r dana jest przez (r ≤ rs):
| I(r)= |
| (1−us +us | √ |
| ) |
Podanie wszystkich opisanych powyżej wartości pozwala narysować kształt zmian blasku źródła podczas przechodzenia w tle soczewki. Nie znamy jednak prędkości źródła, dlatego pozioma oś krzywej blasku nie będzie w jednostkach czasu, tylko długości (parametr t). Ponieważ znamy powiększenie µ, na pionowej osi możemy nanieść zmiany magnitudo źródła:
| Δ mag=−2.5 logµ |
Na płaszczyźnie soczewki narysowana jest krzywa krytyczna, zaznaczone są położenia składników układu oraz narysowane są obrazy. Na płaszczyźnie źródła można znaleźć kaustyki, trasę i aktualne położenie źródła. Przy użyciu myszy można przesuwać źródło (parametr t) oraz zmienić jego trajektorię (zmieniając tym samym kąt β i parametr zderzenia b). Jednostką długości na płaszczyźnie soczewki jest promień Einsteina rE, a na płaszczyźnie źródła, rzutowany promień Einsteina rE = dOL/dOS rE .
Na bieżąco, dla każdego położenia źródła wyliczane i wyświetlane są obrazy, rysowany jest również odpowiadający mu punkt na krzywej blasku. Na panelu obok krzywej prezentowane są aktualne wzmocnienia poszczególnych obrazów.
Wszystkie wykresy można przesuwać i skalować. Chwycenie wykresu i przesunięcie myszy przeciągnie wykres w tym kierunku. Zmianę skali można uzyskać używając suwaka obok wykresu; naciśnięcie kwadratowego przycisku u dołu suwaka powoduje powrót do wyjściowego powiększenia.
Przycisk ,,Rysuj krzywą blasku” wyliczy i wyrysuję jasności źródła dla położeń między wartościami pól ,,od” i ,,do” w odległych o ,,gęstość”.
Wszystko co jest narysowane na ekranie, czyli kaustyki, obrazy, krzywą blasku i krzywą krytyczną można zapisać na dysk. Służy do tego przycisk ,,Zrzuć do plików”. Szczegółowy opis zawartości plików, jak i wiele innych informacji dotyczący programu można znaleźć zakładce ,,Pomoc” poniżej panelu sterowania.
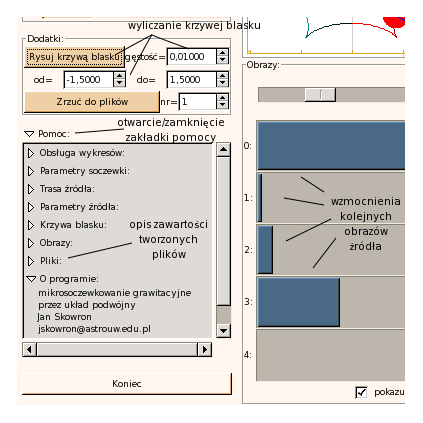
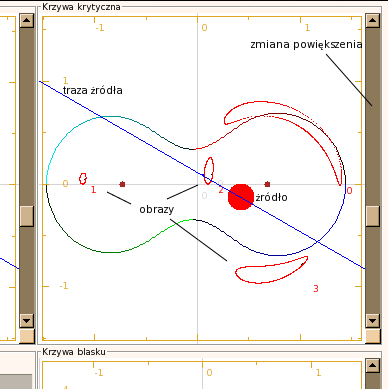
Figure 18: Pomoc do programu i opis wykresu
Program w postaci źródeł znajduje się na płycie dołączonej do pracy. Pracuje w systemach Linux w środowisku graficznym X.Program oraz interfejs graficzny napisany jest w języku C++, a procedury liczące w Fortranie. Do kompilacji i pracy wymaga zainstalowanych w systemie bibliotek gtkmm-2.4. Program można znaleźć w katalogu /binary-lens-model, który zawiera katalog src ze źródłami oraz katalogi include i lib z plikami nagłówkowymi gtkmm-2.4. Na płycie w /dodatki/gtkmm_packages znajdują się także pakiety źródłowe bibliotek wchodzących w skład gtkmm-2.4.
Kompilację programu wywołuje się poleceniem make, które utworzy plik wykonywalny o nazwie: binary-lens-model.
This document was translated from LATEX by HEVEA.
Download full printable PDF version of this document Modele podwójnych soczewek grawitacyjnych.